Difference between revisions of "Maximum Escape Angle/Precise Positional"
Jump to navigation
Jump to search
Skilgannon (talk | contribs) m (→Bot using this technique: It seems I misunderstood the difference between this and precise...) |
Dsekercioglu (talk | contribs) (Added WhiteFang to the list) |
||
| Line 8: | Line 8: | ||
* [[Combat]] | * [[Combat]] | ||
* [[Gilgalad]] | * [[Gilgalad]] | ||
| + | * [[WhiteFang]] | ||
Revision as of 14:30, 21 July 2018

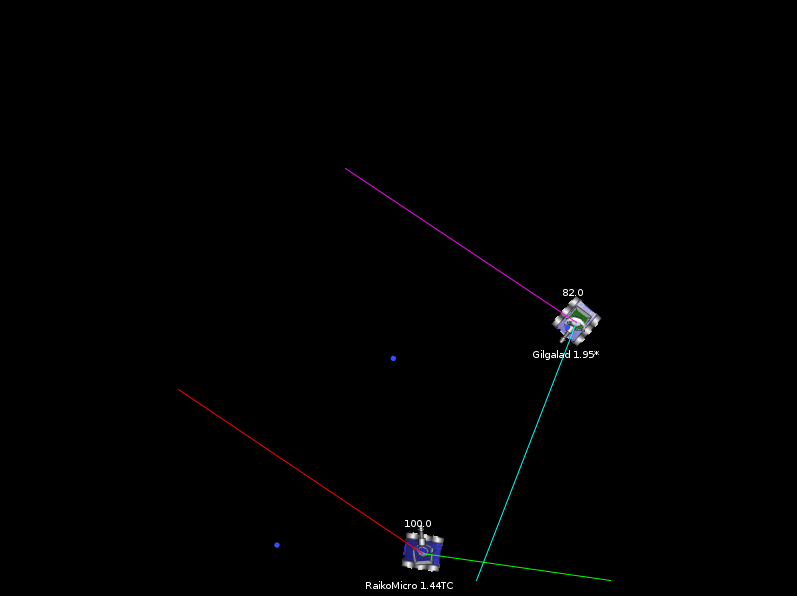
Simple illustration of a PPMEA. (The purple and blue lines show the typical angular wall data used by most bots.)
Precise positional MEA is a method of calculating the MEA of a target robot relative to the aiming robot while ignoring heading and velocity change rules.
Gilgalad's algorithm is pretty simple. The PPMEA of robot A is always going to be the angle most nearly prependicular to the bearing from robot B to robot A which robot A can move at without hitting any walls before a bullet reaches its position. So Gilgalad runs a 'binary search' of the range of angles from prependicular to heading directly towards Gilgalad.